電気探査法を用いた水中センサーの開発
電気探査法と生物的適応アルゴリズムによる3次元海中センシングシステムの構築
工学/総合工学/船舶海洋工学分野 萌芽研究(平成17年~19年)
課題番号:17656285
「電気魚」が周囲の環境を知覚するイメージ図
ある種の魚類は、電気を流すことによって周囲の情報を得ていると考えられており、
これと同じ原理を用いて水中作業用ロボットのセンサーシステムを構築する。
【研究の目的】
本研究では、比抵抗法による電気探査法と生物的適応アルゴリズムとの組み合わせによって、リアルタイムの計測が可能な3次元海中センシングシステムを開発することを目的とする。比抵抗法における観測データの解釈で最も困難を伴う逆問題解析に対して生物的適応アルゴリズムを適用することにより計算処理の高速化・単純化を図る。
【研究の特色と期待される効果】
本研究では、海中センサの原理としてはあまり用いられない比抵抗法による電気探査に注目した。これはセンサデバイスとして単に電極を用いるだけで、海中の絶縁体や金属物の位置を特定した上に種類を識別したり、音響や光によるセンシングでは物体の影に隠れるため探査できない領域も探査できるなど、センサとして極めて優れた特徴を有するが、観測データの解釈に膨大な計算を要する難点がある。本研究は、生物の持つ巧みな仕組みを模倣した生物的適応アルゴリズムを用いて海中センサの情報処理のリアルタイム化を目指す点が特徴である。この新しいセンサシステムの開発は、水中ロボットによる作業自動化へ貢献するだけでなく、新しい製品やサービスを創生する可能性がある。
【関連研究に対する位置づけ】
- 生物的適応アルゴリズムは、
レンズ系設計問題やタンパク質の立体構造解析など
大規模逆解析問題での有効性が報告されており、
本研究で得られる知見は、それらの関連研究と共有できる。
- 比抵抗法による電気探査は、
地中探査法の一種として資源探査だけでなく地雷検出や遺跡探査などでも注目されており、
本研究はそれらの関連研究と直接的に関連する。
- 水中ロボットの研究においては、
電磁波が使えない水中で音響センサが実用化されているが、これとは原理が異なる本センサーを併用することにより、従来計測が難しかった情報も得られるようになり、
水中ロボットで行える作業の種類や領域を拡大できることが期待できる。
以上のように、本研究の成果により大きな波及効果が期待できる。
【研究の背景】
極限環境である海中作業の自動化・省力化への切り札の一つとして、
水中作業ロボットや水中ビークルへの期待が高まりつつある。
これら水中ロボットが高度な作業をこなすためには、
周囲の状況を正確に把握するセンサーが不可欠である。
電磁波が使えない水中では、音響センサが実用化されているが、
これとは原理が異なるセンサーを併用することにより、
従来計測が難しかった情報も得られるようになり、
水中ロボットで行える作業の種類や領域を飛躍的に拡大できることが期待できる。
海水は良導体であることから、
地中探査において実績のある比抵抗法による電気探査センシングシステムの構築が可能である。
これは以下の特徴を有する:
- センサ部分は電極と電流源および電圧計だけで構成されるので、極めて単純で安価に製作できる。
- 海中の絶縁体や金属物の位置を特定した上に、種類をも識別できる。
- 音響や光によるセンシングでは物体の影に隠れるため探査できない領域も探査できる。
など、海中の3次元計測センサとして極めて優れた特徴を持つ。
しかしながら観測データの解釈には膨大な計算が必要であり、
リアルタイム性に問題があることから、
これまで水中作業ロボット用センサとして使用されてこなかった。
【着想に至った経緯】
ある種の魚類は電気探査法の原理で外界の情報を得ていると考えられており、
必要な情報を観測データからもっと高速に得る方法が存在するはずである。
近年、生物の持つ巧みな仕組みを模倣した工学的問題解決の枠組みである生物的適応システムによる大規模問題への接近法が注目され、いくつかの逆解析問題において大きな成果をあげている。
本研究で扱う海中での電気探査問題は、
最適化問題ではあるが、
解くべき問題のパターン(海中の地形など)に統計的な規則が存在する複合問題と考えられるので、
その意味では「学習問題」としての性質もある。
この「学習」に生物的適応システムの機械学習理論を適用することにより、
従来の解析技術とは異なる、全く新しい解析技術となることが期待できる。
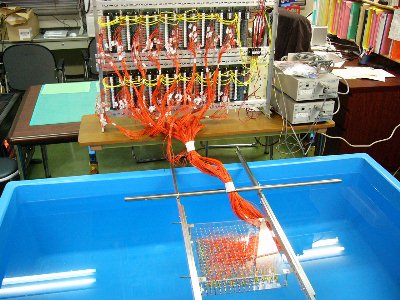 電気探査実験装置
電気探査実験装置
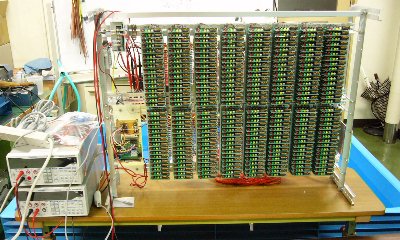 電気探査実験装置 計測中の電極がランプにより確認できる
電気探査実験装置 計測中の電極がランプにより確認できる
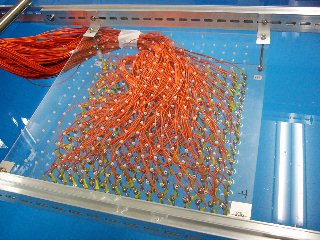 電極
電極
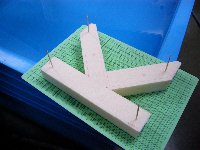 発泡スチロールでできた物体
発泡スチロールでできた物体
 上記の物体を観測したデータ
上記の物体を観測したデータ
 小さな消しゴムを観測したデータ
小さな消しゴムを観測したデータ