ミヤコシキューブとは,互いに隣接する相手のボディを伝って移動可能な
多数のキューブ群で構成されたロボットのことである。
単なる移動だけでなく,アームやハンドに変形してマニュピレーション
を行ったり,必要に応じて分離合体できるため,
様々なタスクを実現可能な,夢のスーパーマシンである.
 荷物の運搬・移動
荷物の運搬・移動  段差乗り越え
段差乗り越え  溝の乗り越え
溝の乗り越え  荷物のジャッキアップ
荷物のジャッキアップ  階段の移動とパイプ通り抜け
階段の移動とパイプ通り抜け  はしご登り
はしご登り  狭い場所の通り抜け
狭い場所の通り抜け  マニュピレータ
マニュピレータ  変形しながら回転移動
変形しながら回転移動  「バルス!」と呪文を叫ぶとバラバラに分解
「バルス!」と呪文を叫ぶとバラバラに分解 88年度入学の宮腰君が提案した。 彼は実現のための努力をしたが,困難を極めた…
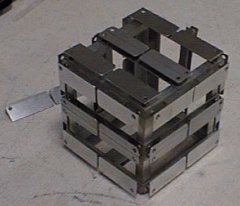
下の写真は,98年度の工大祭におけるロボット技研展示で見かけた ミヤコシキューブの単位キューブである. モータ等はなく,互いに隣接するキューブと噛み合うレール形状を 検討するために試作されたものである。