東工大ロ技研:車輪研の部屋
東京工業大学公認サークル「ロボット技術研究会」での活動
車輪型移動ロボット研究室 (1988--1993)
(注:研究室といっても大学等の研究室とは全く関係なく,
いわゆるクラブの「班」に相当する。)
全方向移動車ロボット(Omni Directional Automatically Guided Vehicle)
全方向移動車とは,前後,左右,ななめ,回転などが自由にできる
特殊な車のことである。
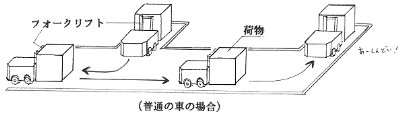
例えばフォークリフトで荷物を運ぶとき、
通常は上の図のように何度も方向転換や切り返しが必要である。
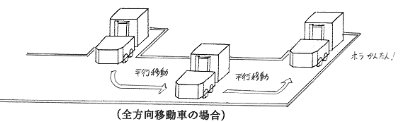
そこで、全方向移動車を用いると、必要最小限の方向転換ですむ。
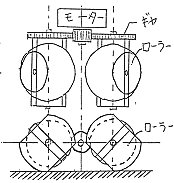
まず誰でも思い付くのが車輪としてボールを用いる機構である。
トラックボールをさかさまにしたような仕組みで作ってみたが、
モータ軸に取り付けた車輪とボールがすべってうまく動力が伝わらず、
完全な失敗作となった。
車輪にボールを用いた全方向移動車1号機 (18KB) 
車輪にボールを用いた全方向移動車1号機の裏側 (18KB)

方向性滑り車輪を用いた全方向移動車
全方向移動車2号機と3号機 (12KB)
全方向移動車3号機の裏側 (20KB)
全方向移動車4号機 (15KB)
全方向移動車4号機の裏側 (21KB)
3号機,4号機の車輪機構に関して特許を取得(特許第1616094号)したが,
平成9年に失効しているので,
現在は誰でも自由に使えるはずである。
全方向移動車5号機 (14KB) 
全方向移動車5号機の裏側 (17KB)
全方向移動車5号機 試運転1
サイズ小 (176x112 MPEG1ムービー,1.85MB) サイズ大 (352x240 MPEG1ムービー,8.12MB)
全方向移動車5号機 試運転2
サイズ小 (176x112 MPEG1ムービー,2.17MB) サイズ大 (352x240 MPEG1ムービー,8.84MB)

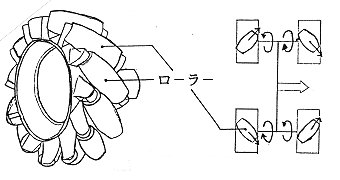
メカナムホイールを用いた全方向移動車
途中で制作を投げ出した全方向移動車6号機 (16KB)
全方向移動車7号機 (18KB)
全方向移動車7号機 '91 工大祭展示
サイズ小 (176x112 MPEG1ムービー,2.83MB) サイズ大 (352x240 MPEG1ムービー,12.8MB)
方向性滑り車輪を用いた全方向移動車

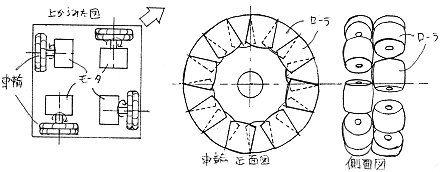
最終バージョンは点対称のメカとすることにより、
全体の1/4の設計図を書いて同じ部品を4個作って
組み立てた。
また、この8号機は2台制作し、通信による協調動作などにも
挑戦した。
全方向移動車8号機 (17KB)
全方向移動車8号機の裏側 (18KB)
拡大写真 (435KB)
この車輪と類似の形状の車輪は、「オムニホイール」という商品名でコンベア用ローラーとして
安価なものが市販されている。近年、高専部門のロボットコンテスト等でもよく用いられている。
市販品の車輪の大きさは直径125mm程度で値段は1個数千円らしい。詳細はネット検索で探すか、
株式会社富士製作所(本社大阪) のコンベアシステム営業担当へ直接問い合わせてください。
私にメールで質問されても困りますので
位置制御方法:
床に格子状に貼られたアルミテープをホトセンサで
読み取ることにより位置を検出する。
ユーザはロボットに動作の順番を指示する。
動作は格子点から別の格子点への移動という形で表現される。
格子状アルミテープによる誘導の説明: (55KB)
全方向移動機構を生かした動作の説明: (63KB)
92年工大祭展示(格子状アルミテープによる誘導,2台の協調動作等)
サイズ小 (176x112 MPEG1ムービー 1.60MB) サイズ大 (352x240 MPEG1ムービー 7.34MB)
全方向移動車8号機 試運転 ('91.5.5)
サイズ小 (176x112 MPEG1ムービー 2.83MB) サイズ大 (352x240 MPEG1ムービー 16.4MB)
東京工業大学ロボット技術研究会報告書 RTC003.pdf
東京工業大学ロボット技術研究会報告書 RTC002.pdf
東京工業大学ロボット技術研究会報告書 RTC001.pdf
電気自動車 (電製研) 
人が乗れるくらいの大きさのシャシに車輪を取り付け,車輪を電動機(モータ)で駆動するだけだが,
モータのメンテナンス性や故障の少なさなどを考えると交流モータを使いたい。
直流モータはブラシが磨耗するなどの問題があるのをご存知だろうか。
現在,新型の電気鉄道車両のほとんどにおいて交流モータが使われている。
しかし交流モータでトルクや速度を制御するのはけっこう大変であるため,
そう簡単に自作電気自動車へ搭載できないという問題がある。
そこでマイコン制御の交流モータドライブ回路(インバータと呼ばれる)を自作して搭載しよう
というプロジェクトだった。
道岡さんという先輩が最初に言い出し,大学のくず鉄置き場から
でかくて重い3相誘導モータを拾ってきたのが始まり。桑子氏が回路を担当,
車輪にうるさい私はシャシに車輪とモータを取り付けた。
マイコンによってモータコイル電流をスイッチングして,3相正弦波交流電流を流し,モータ速度に対して
もっとも効率良い周波数になるように制御する。>そうだったよね桑子君
●'91工大祭での笑えるデモ走行?の様子
(176x120 MPEG1ムービー 4.88MB)
(352x240 MPEG1ムービー 15.2MB)
ムービーを見るとわかるが,車体からコンセントを引きずって走ってるし,
出力を上げたり1分以上の長時間稼動させると(マイコンプログラムの暴走などが原因で)
1個数万円のパワートランジスタが火を噴くので1〜2メートル走らせるのがやっとだし,
人も乗せていないという,いったい何やってんだか分からないというマシンだ。
傍からみるとクレイジー以外の何物でもないが,そこが東工大らしいいい味をだしてると思う。
交流モータの制御はかように困難で奥が深いということがお分かりいただけるだろうか。
ミヤコシキューブとは,互いに隣り合う相手のボディを伝って移動可能な
多数のキューブ群で構成されたロボットのことである。
単なる移動だけでなく,アームやハンドに変形してマニュピレーション
を行ったり,必要に応じて分離合体できるため,
様々なタスクを実現可能な,夢のスーパーマシンである.
88年度入学の宮腰君が提案した。
彼は実現のための努力をしたが,困難を極めた…
ご意見・ご感想・お問い合わせは下記までe-mailにてお願いします:

もどる
