報酬駆動型環状ロボットの実現と評価
荒牧 岳志(発表者),木村 元,小林 重信
計測自動制御学会第29回知能システムシンポジウム(2002.03.28--29,学術総合センター)
発表用OHP資料
[OHP 01]
[OHP 02]
[OHP 03]
[OHP 04]
[OHP 05]
[OHP 06]
[OHP 07]
[OHP 08]
[OHP 09]
[OHP 10]
[OHP 11]
[OHP 12]
[OHP 13]
[OHP 14]
[OHP 15]
[OHP 16]
[OHP 17]
[OHP 18]
[OHP 19]
[OHP 20]
[OHP 21]
[OHP 22]
[OHP 23]
[OHP 24]
[OHP 25]
[OHP 26]
[OHP 27]
[OHP 28]
[OHP 29]
[OHP 30]
[OHP 31]
[OHP 32]
[OHP 33]
[OHP 34]
[OHP 35]
[OHP 36]
[OHP 37]
[OHP 38]
[OHP 39]
[OHP 40]
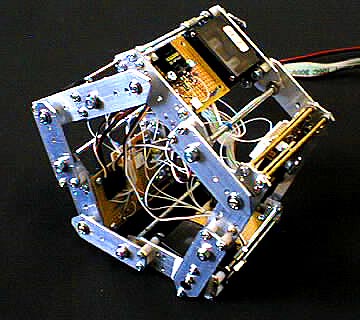 5リンク環状ロボットとは?
5リンク環状ロボットとは?
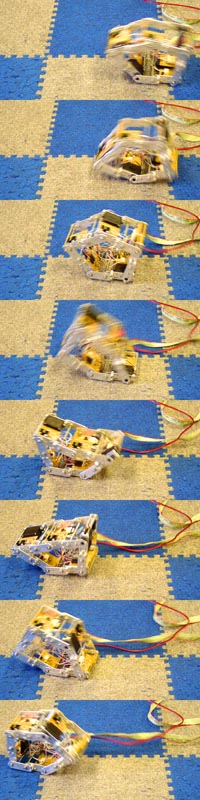
5リンク環状ロボットの動作ムービー
直接クリックしても見れない場合は,
右クリック等で「対象をファイルに保存」でmpgファイルを保存してからメディアプレイヤー等で見てください:
学習初期にランダムに動作している5リンク環状ロボットのムービー,
Pen01_0_10sec.mpg, File size = 2.17MB (約10秒)
光センサ、複数基底を用いた提案手法で学習した5リンク環状ロボットのムービー,40000 step 学習後
Jikken6_040000_4.mpg, File size = 1.8MB (約6秒)
資料
荒牧 岳志,木村 元,小林 重信:
報酬駆動型環状ロボットの実現と評価,
計測自動制御学会第29回知能システムシンポジウム, pp.183--188 (2002).
6 pages, postscript file, AramakiSICE2002.ps (9.27MB)
6 pages, PDF file, AramakiSICE2002.pdf (6.59MB)
荒牧 岳志,木村 元,小俣 透,小林 重信:
強化学習による2アクチュエータ5リンク環状ロボットの移動動作獲得,
第19回日本ロボット学会学術講演会 (2001).
2 pages, PDF file, acc0133.pdf (261KB)
「発表論文一覧」へもどる
「強化学習の適用例:ロボットの移動動作獲得」へ戻る
2002年4月3日更新