変な歯車いろいろ
一枚歯インボリュート歯車
 動画gif(135KB)
動画gif(135KB)
 動画gif(113KB)
動画gif(113KB)
円に巻き付けた糸をほどく時,糸の端が描く軌跡は
インボリュート曲線として知られている。
これを歯形曲線として用いるのがインボリュート歯車である。
インボリュート歯車は,角速度一定でかみ合ったり,
力のかかる作用線の方向(圧力角)が一定,
歯切り加工が簡単,
軸間距離が少しずれても影響が少ないなどの性質があるため,
一般に広く用いられている。
実用的には6歯くらいが最小歯数だろうと言われている。
協育歯車工業のKGギヤカタログによると,平歯車で8枚,はすば歯車で13枚くらいの
最小歯数の製品が見られる。
13枚歯のはすば歯車のかみあい(実物の写真)
(モジュール1.5,ねじれ角45°,左側=ねじれ方向左,右側=ねじれ方向右)
参考:13枚歯の食違い軸歯車(ねじ歯車)のかみあい(実物の写真)
(モジュール1.5,ねじれ角45°,左側,右側共にねじれ方向左)
理論的には,同じ歯数同士なら5枚同士,あるいは片方が3枚でもう片方が11枚以上
がインボリュート平歯車の最小歯数として発表されている(文献4参照)。
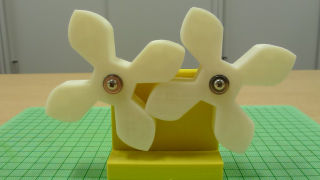
はすば歯車の場合,理論の上では上図のような一枚歯も設計可能である。
そこで,これが本当にちゃんと噛み合って回るかどうかを
コンピュータでシミュレートした。
一枚歯インボリュート歯車の動くデモ (Javaアプレット + 動画gif)
このような歯車は接触面のすべりが大きくロスが多いため,実用性は全くない。
理論を実証するためだけにしか役に立たないが,筆者はそこが気に入っている。
CGだけでは滑り摩擦による伝達効率などを実感できないので,エポキシ樹脂を
用いて以下のような実物を作ってしまった。

 実物の1枚歯の歯車製作のページへ
実物の1枚歯の歯車製作のページへ
ポリテクセンター関東の成田様よりメールにてご提供頂いた実物の写真

成瀬先生(このページの参考文献の著者)が初代学校長を勤められた、「職業能力開発総合大学
校(旧名:職業訓練大学校)」で製作されたもので,
一枚歯二枚歯三枚歯の歯車が,
加工技術課題として当時の機械科で製作されたそうです。
写真の作品は,2001年11月3~4日
に開催された学園祭で展示されていたものとのこと。
貴重な情報ありがとうございます。
サイクロイド歯車
 動画gif(145KB)
動画gif(145KB)
 動画gif(80KB)
動画gif(80KB)
 動画gif(52KB)
動画gif(52KB)
転がる円の円周上の一点が描く軌跡は,
サイクロイド曲線として知られている。
基礎円の外側を転がる円の軌跡は外転サイクロイド(エピサイクロイド),
基礎円の内側を転がる円の軌跡は内転サイクロイド(ハイポサイクロイド)
と呼ばれている。
この内外転サイクロイド曲線を歯形曲線として用いるのが
サイクロイド歯車である。
基礎円の外側を転がる円の直径を無限大にしたときの軌跡は、
インボリュート曲線になる。
また,円も直線もサイクロイド曲線に含まれる。
サイクロイド歯車の場合,3枚歯の外歯車同士がかみあう設計例が
報告されている(文献4参照)。
サイクロイド歯車は,噛み合う歯同士が接する部分のすべりが歯面全体において一様であるため
摩耗に強いが,歯切り加工が困難であるため,
時計やポンプなど特殊な用途にしか用いられていない。
(これら利点欠点については文献によって記述が食い違っているので,場合によるのかもしれない)
これも理屈の上では1枚歯とか2枚歯の歯車が設計可能である。
本当に噛み合って回るかどうかを
コンピュータでシミュレートした。
- 同一形状外歯サイクロイド歯車同士のかみあい
- 異なるサイクロイド歯車同士のかみあい
これらはロータリーエンジンやポンプなどによく利用される。
参考文献1:技能ブックス(13)/歯車のハタラキ,大河出版
参考文献2:歯車 第1巻 新版,仙波正荘 著,日刊工業新聞社
参考文献3:メカニズムの事典,理工学社
参考文献4:歯車の研究,成瀬政男 監修,養賢堂
負荷感応型自動無段変速機 (2006.11.09)
何気なくロボコンマガジンという雑誌を読んでいたら、
歯車だけから構成される負荷感応型無段変速機という、
インパクトのある記事があったので紹介する(文献5参照)。
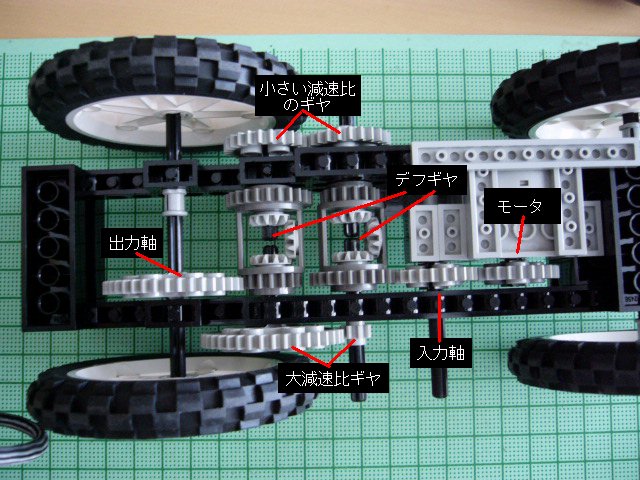
この変速機は、デファレンシャルギヤ(通称デフギヤ:差動歯車)を2組使うというものである。
入力軸に入ってきた動力は、差動歯車により2系統に分配され、片方は大減速比ギヤへ、
もう片方は減速比の小さいギヤへと伝えられる。
この減速比の異なる2つの系統に分かれた動力は、再び差動歯車によって統合され、
出力軸へと出て行くものである。
出力側の負荷が大きくなるとギヤ比の大きなほうの系統から動力が伝えられ、
負荷が小さいと減速比の小さな系統から伝えられる。
この切り替えが差動歯車という「メカ」のみによって無段階にかつ自動的に行われる
という点がすばらしい。
しかしながら、負荷に応じて減速比が変わるという部分は、
差動歯車の持つ抵抗損失が回転速度や
回転パターンによって異なるという現象が本質的に関与しているらしいので、
変速機に対する適切な負荷の大きさを決めるのが難しいように思える。
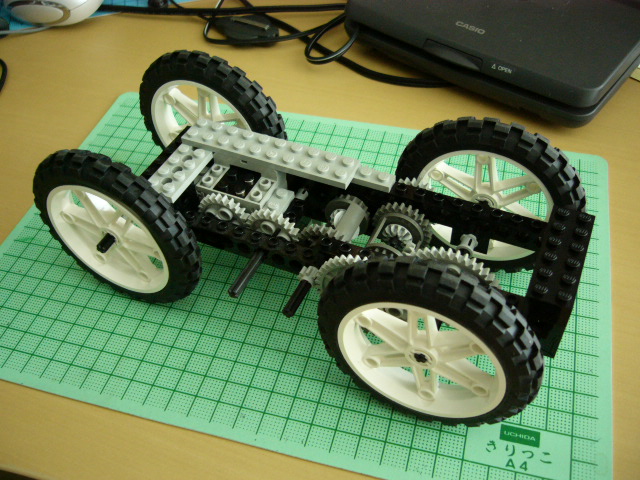
とはいえ、ロボコンマガジンの記事ではレゴのMindStormsのギヤを使って組立例を示しており、
この記事で紹介されているようなメカと規模であればうまく動くようである。

参考文献5:ロボコンマガジン,No.44, pp.122--123 (2006), オーム社
(2010.09.17 追記) YouTubeでこの無段変速機を使ったと思われる動画を見つけましたのでリンクしておきます
ご意見・ご感想・お問い合わせは下記までe-mailにてお願いします:

もどる
Go to Kobayashi Lab.
 動画gif(135KB)
動画gif(135KB)
 動画gif(113KB)
動画gif(113KB) 動画gif(145KB)
動画gif(145KB)
 動画gif(80KB)
動画gif(80KB)
 動画gif(52KB)
動画gif(52KB)
 41KB
41KB
 40KB
40KB